Project Members:
Andrew McDiarmid
Jess Kline
Description
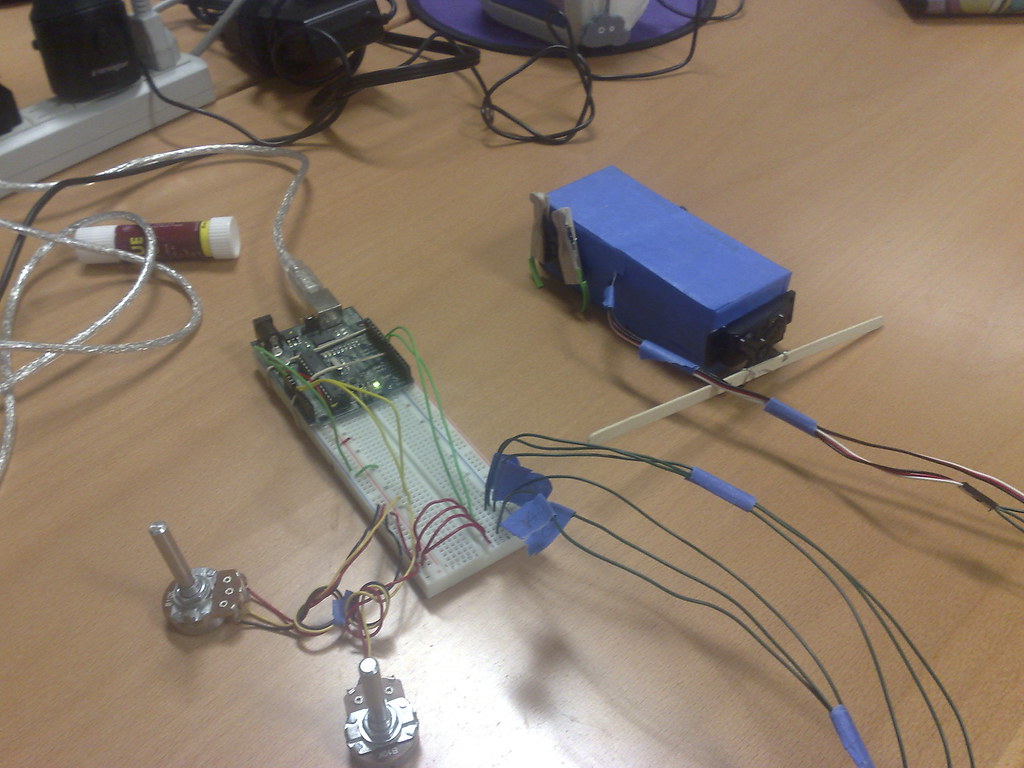
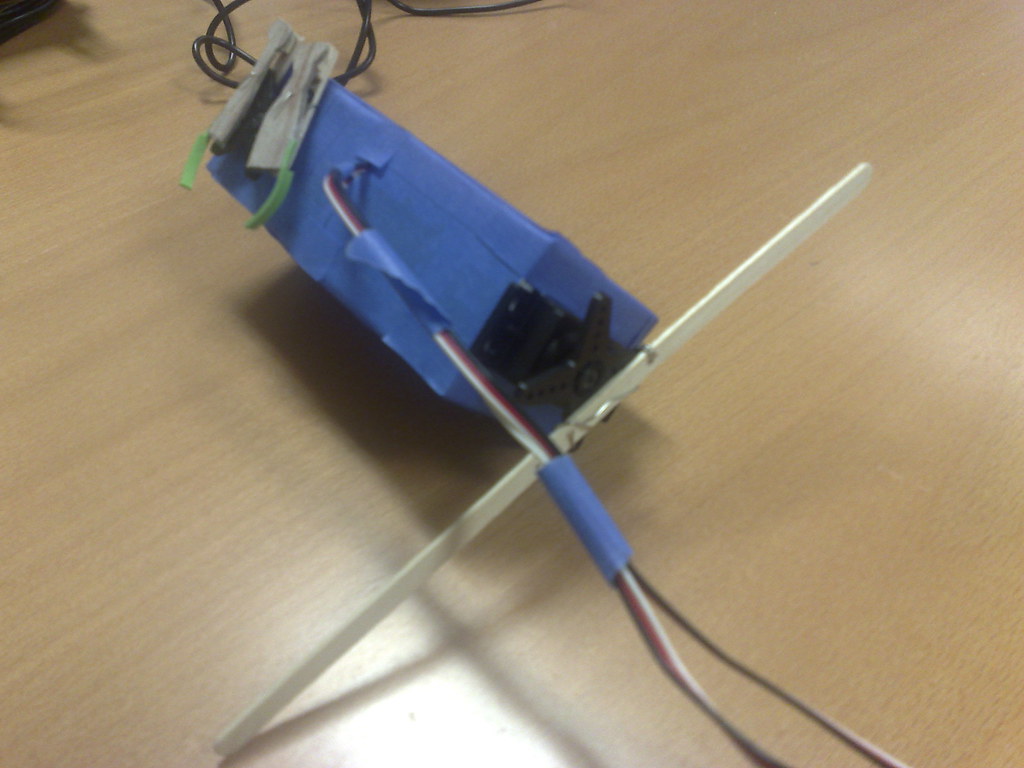
It's a boat! And it paddles and flips! We used two servo motors to manuever this canoe/kayak/boat. One motor paddles forward (sometimes backward too) and the other motor flips the boat over. A bet your thinking "how does it paddle once it flips over?" And the answer is there are two paddles on the paddle motor, allowing the boat to move whichever side it is on.
Components
- Lab 7 materials: breadboard, arduino board, lots of wires, 2 potentiometers, 2 servo motors
- Canoe: 2 servo motor boxes, 2 oars (cardboard, wires, and small coffee stirrer pieces), 1 flipper (coffee stirrer and wires)
We used a random collection of tools and supplies to assemble this boat: a bottle opener, a mechanical pencil, a leatherman, scissors, gluestick, and 3 kinds of tape.
Arduino Code
/*
* Servo with Potentiometer control
* Theory and Practice of Tangible User Interfaces
* October 11 2007
*
* Code copied and doubled for use with two servos
* by Andrew McDiarmid and Jess Kline
* October 17 2007
*/
int servoPin = 7; // Control pin for servo motor
int potPin = 0; // select the input pin for the potentiometer
int secondPotPin = 1;
int secondServoPin = 8;
int pulseWidth = 0; // Amount to pulse the servo
int secondPulseWidth = 0;
long lastPulse = 0; // the time in millisecs of the last pulse
long secondLastPulse = 0;
int refreshTime = 20; // the time in millisecs needed in between pulses
int val; // variable used to store data from potentiometer
int secondVal;
int minPulse = 500; // minimum pulse width
void setup() {
pinMode(servoPin, OUTPUT); // Set servo pin as an output pin
pinMode(secondServoPin, OUTPUT);
pulseWidth = minPulse; // Set the motor position to the minimum
Serial.begin(9600); // connect to the serial port
Serial.println("servo_serial_better ready");
}
void loop() {
val = analogRead(potPin); // read the value from the sensor, between 0 - 1024
secondVal = analogRead(secondPotPin);
if (val > 0 && val <= 999 ) {
pulseWidth = val*2 + minPulse; // convert angle to microseconds
Serial.print("moving servo to");
Serial.println(secondPulseWidth,DEC);
}
if (secondVal > 0 && secondVal <= 999) {
secondPulseWidth = secondVal * 2 + minPulse;
Serial.print("moving second servo to ");
Serial.println(secondPulseWidth,DEC);
}
updateServo(); // update servo position
secondUpdateServo();
}
// called every loop().
void updateServo() {
// pulse the servo again if rhe refresh time (20 ms) have passed:
if (millis() - lastPulse >= refreshTime) {
digitalWrite(servoPin, HIGH); // Turn the motor on
delayMicroseconds(pulseWidth); // Length of the pulse sets the motor position
digitalWrite(servoPin, LOW); // Turn the motor off
lastPulse = millis(); // save the time of the last pulse
}
}
void secondUpdateServo() {
// pulse the servo again if rhe refresh time (20 ms) have passed:
if (millis() - secondLastPulse >= refreshTime) {
digitalWrite(secondServoPin, HIGH); // Turn the motor on
delayMicroseconds(secondPulseWidth); // Length of the pulse sets the motor position
digitalWrite(secondServoPin, LOW); // Turn the motor off
secondLastPulse = millis(); // save the time of the last pulse
}
}
Photos
http://farm3.static.flickr.com/2242/1607854139_a8d8117a52_b.jpg
http://farm3.static.flickr.com/2155/1607898881_926e93dff0_b.jpg

{kind=link}
{kind=link}