In this lab I tried to create a "crawler" that would operate like an insect because a six legged crawler can always keep three feet on the ground. I got quite caught up in the design of the body and support structures. I ran into significant trouble with the motion of the legs however, and could not get this to work by classtime. Oh well - it might be fun to finish for next week.
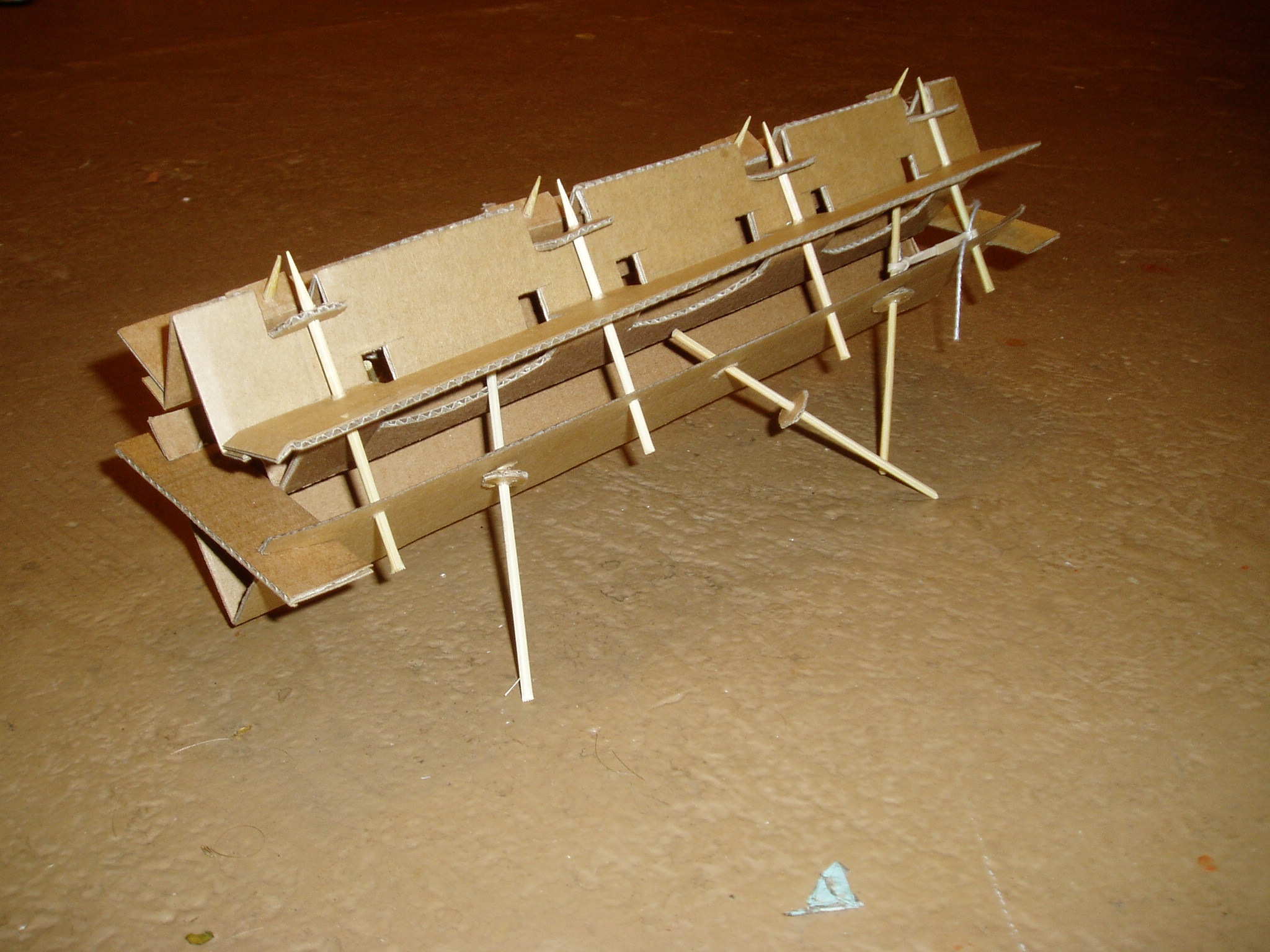
As can be seen from the pictures, the legs were arranged along an elongated body. Each leg is held in a fwd position by a rubber band, and the leg is pulled back by the servo motor (which is not pictured...). The rubber band then pulls the leg back to the fwd position (which, by reversal of motion through the axis propells the crawler fwd).
My main trouble was that the force inherent in the tension of the rubber bands tended to distort the structure, pull the legs out of their sockets, and detach the bands themselves. Also, the irregular surfaces of the cardboard tended interfere with the smooth motion of the legs. Also, a planned "gate" which would allow the legs to move only one direction in their sockets would not work as I neglected to account for the acute angle at which the end of the leg met the socket at it apoapsis.
It has been an interesting process working with materials outside the context in which I usually work as a sculptor. It is exciting to see how form follows function - how this leads to more and more specific solutions. But in my sculpture and contemporary art in general the failure of materials and arriving at an endpoint that is completely unforseen is valued more highly than harnessing the use-value of one's materials. This is taking some getting used to for me, but teaching me a lesson in physical and thought processes.

{kind=link}
{kind=link}