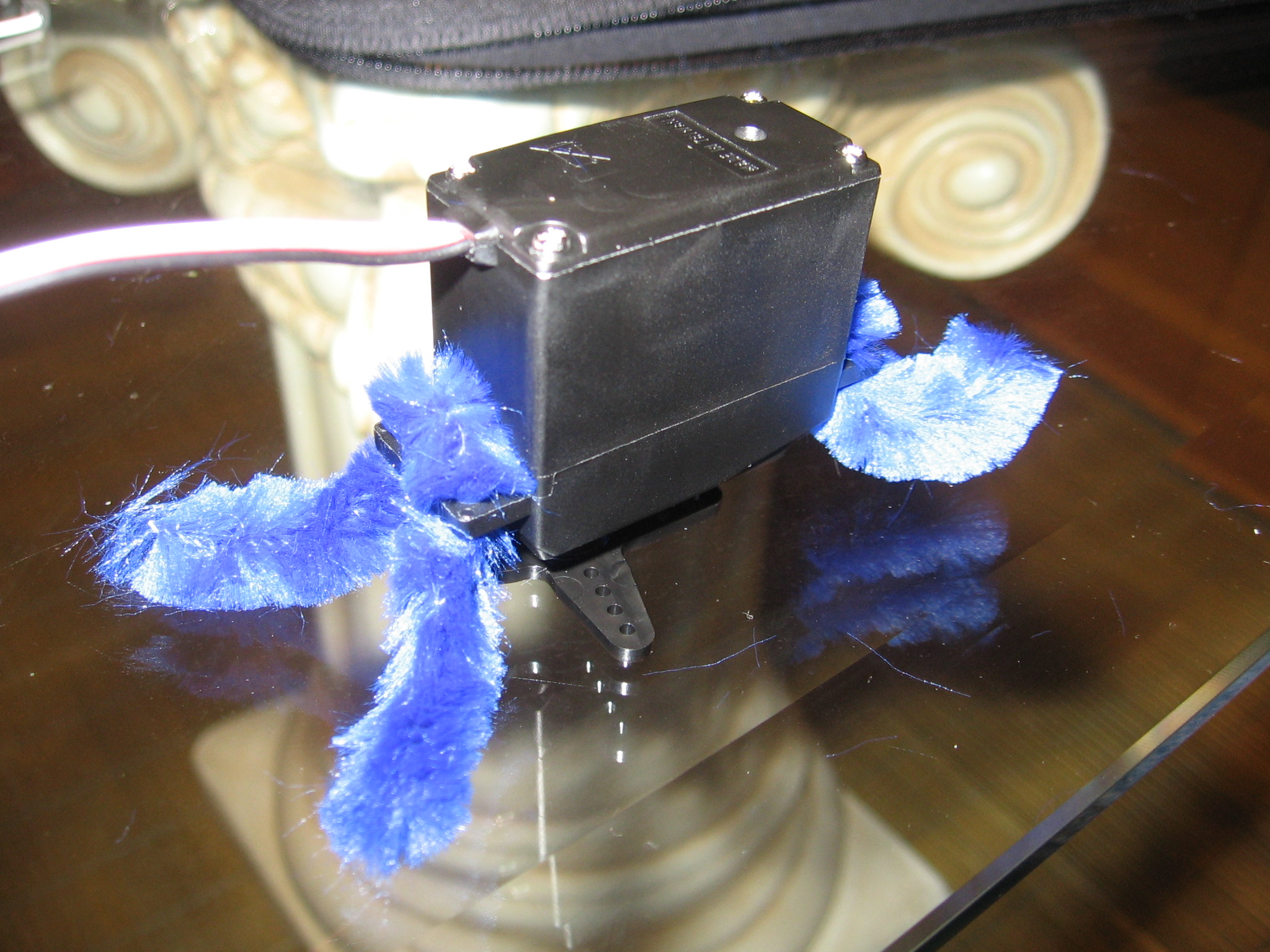
For this project, I wracked my brain and tried to come up with a crawler design that was derivative of the one that was in the class handout. After several attempts with that alignment (including taping the servo to the breadboard and attempting to make the entire assembly crawl), I finally decided to take another approach. I set the servo motor on the table with the fan facing downwards and attempted to make it crawl. I attained the best success with this alignment, so I stayed with this. I used pipe cleaner to stabilize the motor and provide a bit of "sideways wobble" for traction. The overall effect of the crawler is that it resembles a baby attempting to crawl.
Components:
Arduino Microprocessor
Breadboard
1 potentiometer
Servo motor
Connecting wires
Source Code:
int servoPin = 7; // Control pin for servo motor
int minPulse = 500; // Minimum servo position
int maxPulse = 2500; // Maximum servo position
int pulse = 0; // Amount to pulse the servo
long lastPulse = 0; // the time in milliseconds of the last pulse
int refreshTime = 20; // the time needed in between pulses
int analogValue = 0; // the value returned from the analog sensor
int analogPin = 0; // the analog pin that the sensor's on
void setup() {
pinMode(servoPin, OUTPUT); // Set servo pin as an output pin
pulse = minPulse; // Set the motor position value to the minimum
Serial.begin(9600);
}
void loop() {
analogValue = analogRead(analogPin); // read the analog input
pulse = (analogValue * 19 ) / 10 + minPulse; // convert the analog value
// to a range between minPulse
// and maxPulse.
// pulse the servo again if rhe refresh time (20 ms) have passed:
if (millis() - lastPulse >= refreshTime) {
digitalWrite(servoPin, HIGH); // Turn the motor on
delayMicroseconds(pulse); // Length of the pulse sets the motor position
digitalWrite(servoPin, LOW); // Turn the motor off
lastPulse = millis(); // save the time of the last pulse
}
}

{kind=link}