Assignment: Simple Mechanics: Cuckoo Clock
Collaborators:
Assignment: Simple Mechanics: Cuckoo Clock
Collaborators: eknight, davida, xiaomeng
Authors:
Erin, David, Xiaomeng
Description:
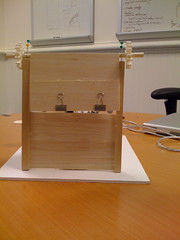
We collaborated to build a cuckoo clock mechanism that is accuated.
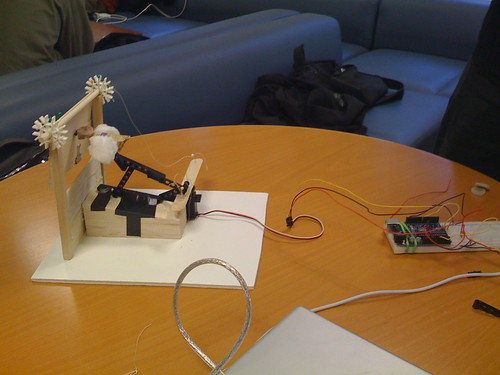
Our cuckoo clock is controlled by a servo and a pot. But turning the pot in one direction, the door raises and the bird pops out. The other direction of the pot then pulls the bird back in and releases the door.
Materials:
Pictures/Movies:

Discussion:
We spent a lot of time trying to get the motion and torque working. There was a lot of learning by playing as Lora had mentioned! We focused much more on getting the motion right and the accuation than the aesthetics but we got it working!! If we had more time, we would have tried to come up with a stronger, more stable arm to push the bird out further.
Code:
/*
* Servo with Potentiometer control
* Theory and Practice of Tangible User Interfaces
* October 11 2007
*/
int servoPin = 7; // Control pin for servo motor
int potPin = 0; // select the input pin for the potentiometer
int pulseWidth = 0; // Amount to pulse the servo
long lastPulse = 0; // the time in millisecs of the last pulse
int refreshTime = 20; // the time in millisecs needed in between pulses
int val; // variable used to store data from potentiometer
int minPulse = 500; // minimum pulse width
void setup() {
pinMode(servoPin, OUTPUT); // Set servo pin as an output pin
pulseWidth = minPulse; // Set the motor position to the minimum
Serial.begin(9600); // connect to the serial port
Serial.println("servo_serial_better ready");
}
void loop() {
val = analogRead(potPin); // read the value from the sensor, between 0 - 1024
if (val > 0 && val <= 999 ) {
pulseWidth = val*2 + minPulse; // convert angle to microseconds
Serial.print("moving servo to ");
Serial.println(pulseWidth,DEC);
}
updateServo(); // update servo position
}
// called every loop().
void updateServo() {
// pulse the servo again if the refresh time (20 ms) has passed:
if (millis() - lastPulse >= refreshTime) {
digitalWrite(servoPin, HIGH); // Turn the motor on
delayMicroseconds(pulseWidth); // Length of the pulse sets the motor position
digitalWrite(servoPin, LOW); // Turn the motor off
lastPulse = millis(); // save the time of the last pulse
}
}