Assignment: Servo Motor: Actuation Assignment 2
Collaborators:
Collaborators: Laura Paajanen
Description
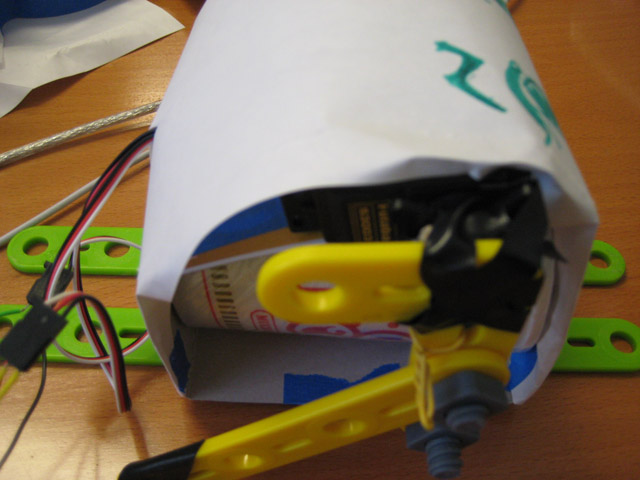
We created a crawler that ended up hopping more than crawling, so we turned him into a frog. We put a servo on each side, attached to legs that bent so as to provide forward force but not push backwards. At first, the legs were moving at alternating times, but that caused a lot of truning side to side, so we modified our arduino code to make the legs move together (which was actually the motors moving in reverse directions). This created the pleasant surprise of the hopping motion.
Components Used
Our video is sideways, tilt your head!
Arduino Code
/*
* Two servos with two potentiometer control
* Theory and Practice of Tangible User Interfaces
* October 11 2007
* Edited by Christina and Laura
*/
int servoPin1 = 7; // Control pin for servo motor 1
int servoPin2 = 8; // Control pin for servo motor 2
int potPin1 = 0; // select the input pin for the potentiometer 1
// int potPin2 = 1; // select the input pin for the potentiometer 2
int pulseWidth1 = 0; // Amount to pulse the servo 1
int pulseWidth2 = 0; // Amount to pulse the servo 2
long lastPulse1 = 0; // the time in millisecs of the last pulse of servo 1
long lastPulse2 = 0; // the time in millisecs of the last pulse of servo 2
int val_1; // variable used to store data from potentiometer 1
int val_2; // variable used to store data from potentiometer 2
int refreshTime = 20; // the time in millisecs needed in between pulses
int minPulse = 500; // minimum pulse width
void setup() {
pinMode(servoPin1, OUTPUT); // Set servo pin 1 as an output pin
//pinMode(servoPin2, OUTPUT); // Set servo pin 2 as an output pin
pulseWidth1 = minPulse; // Set the motor position to the minimum
pulseWidth2 = minPulse; // Set the motor position to the minimum
Serial.begin(9600); // connect to the serial port
Serial.println("Two servos with two potentiometers ready");
}
void loop() {
val_1 = analogRead(potPin1); // read the value from the sensor 1, between 0 - 1024
val_2 = 1024-analogRead(potPin1); // read the value from the sensor 2, between 0 - 1024
if (val_1 > 0 && val_1 <= 999 ) {
pulseWidth1 = val_1*2 + minPulse; // convert angle to microseconds
}
updateServo1(); // update servo 1 position
if (val_2 > 0 && val_2 <= 999 ) {
pulseWidth2 = val_2*2 + minPulse; // convert angle to microseconds
}
updateServo2(); // update servo 2 position
//updateServo(); // update servo 1 position
}
/*void updateServo() {
if (millis() - lastPulse1 >= refreshTime) {
digitalWrite(servoPin2, HIGH);
digitalWrite(servoPin1, HIGH);
delayMicroseconds(pulseWidth1);
// delayMicroseconds(pulseWidth2);
digitalWrite(servoPin1, LOW);
digitalWrite(servoPin2, LOW);
lastPulse1 = millis();
}
}*/
void updateServo1() {
if (millis() - lastPulse1 >= refreshTime) {
digitalWrite(servoPin1, HIGH);
delayMicroseconds(pulseWidth1);
digitalWrite(servoPin1, LOW);
lastPulse1 = millis();
}
}
void updateServo2() {
if (millis() - lastPulse2 >= refreshTime) {
digitalWrite(servoPin2, HIGH);
delayMicroseconds(pulseWidth2);
digitalWrite(servoPin2, LOW);
lastPulse2 = millis();
}
}
Our board
The frog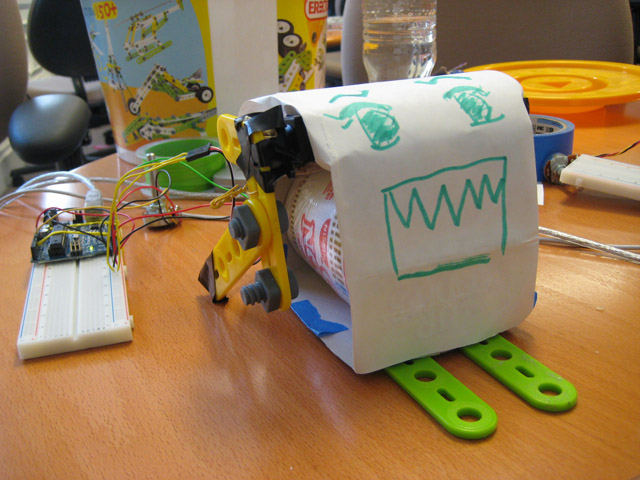
The servo and leg's attachment