Assignment: Servo Motor: Actuation Assignment 2
Collaborators:
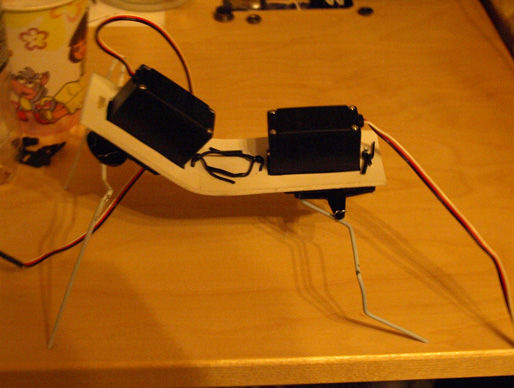
I constructed a 4-legged robot using 2 servos. The legs are bent coathangers and the body is made from rigid PVC foam that can be softened in boiling water and formed--it's really cool stuff. I found it at an art supply store.
I took the basic body shape and leg arrangement from an Instructable found here, but I built the walker mostly without referring to the instructions and, of course, working out the circuitry and programming from scratch.