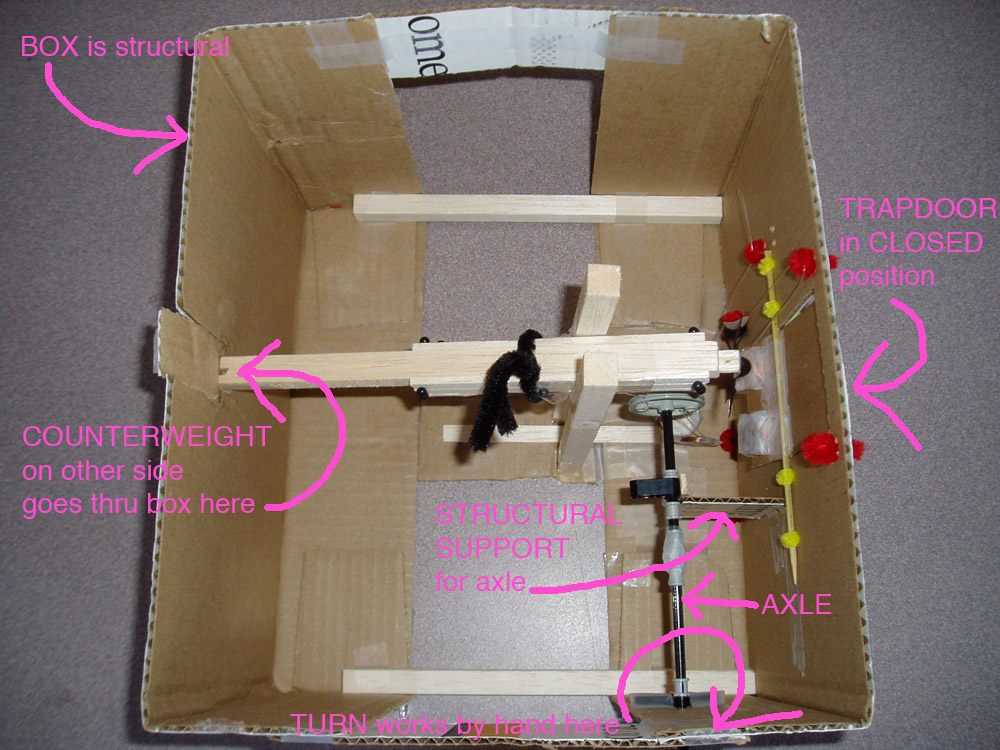
In this lab we tried to create a cuckoo clock that was driven by only one drive wheel. (We'd like to say that we were attempting to do something extra hard to make up for the fact that we missed class, but the truth is we didn't know how hard this was going to be....) :)
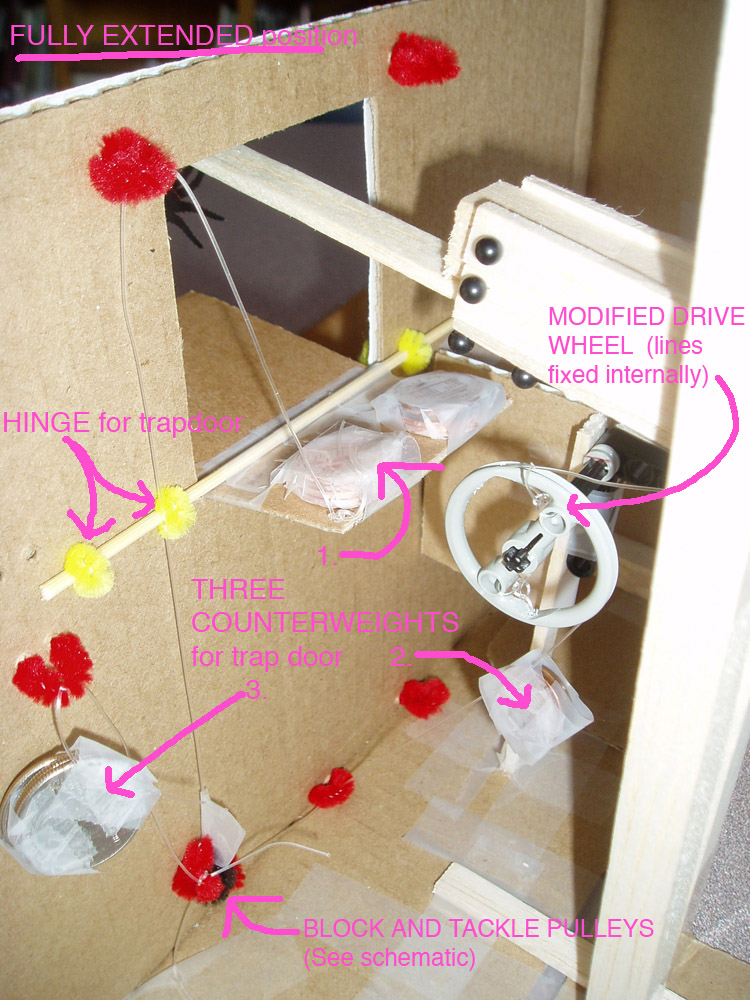
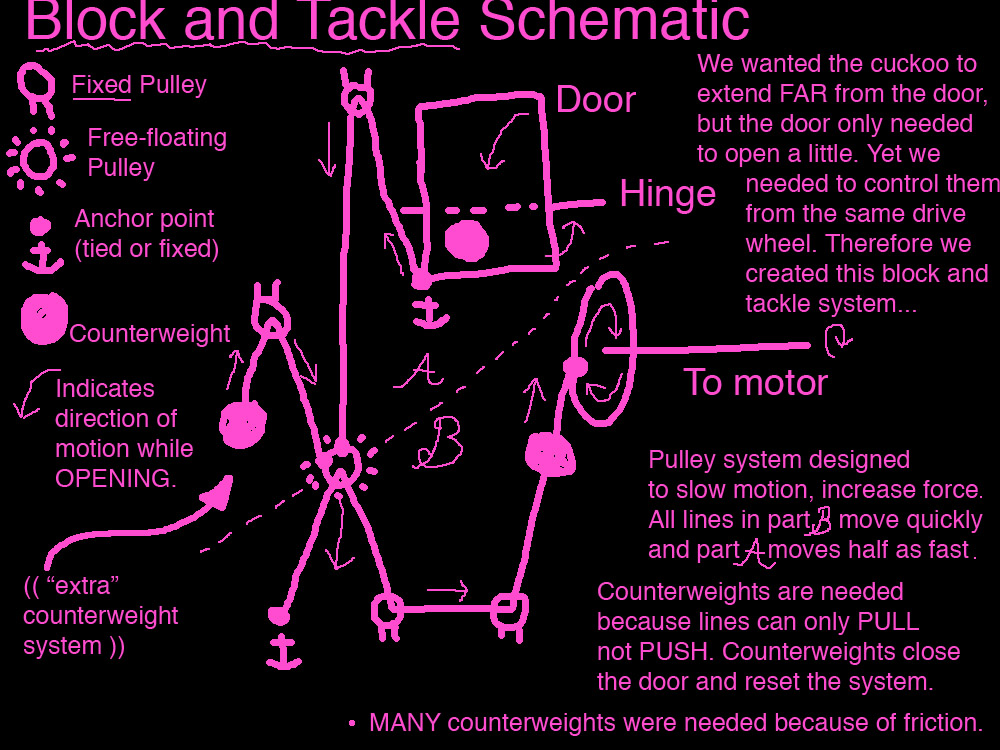
We successfully created a block-and-tackle system to allow the cuckoo to extend quickly and far while the door opens slowly and with more power. We also successfully used a counterweight system to close the door, retrack the cuckoo, and reset the system.
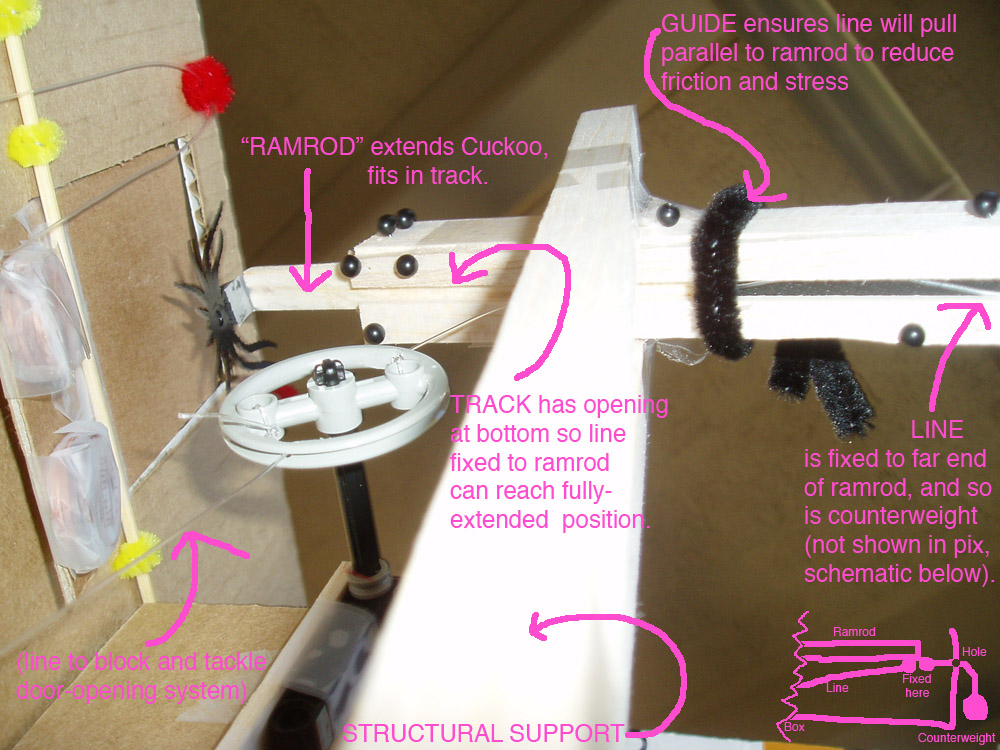
The biggest challenge that we had to overcome was the friction that resulted from our use of materials. The biggest source of fricton, surprisingly, was not from the balsa-wood track-and-ramrod system used to extend the cuckoo, but from the overly-robust gage of the lines used in our pulley system. We overcame this problem by using an abundance of counterweights.
This, of course, led to another problem, which is that the system became a bit too heavy for the servo motor to power. This problem could easily be overcome by using a simple gear system.
This lab report is accompanied by four detailed, labelled, and aesthetically-stimulating images that explain the function of our cuckoo clock and materials used better than words alone could. Take a look!
PS - The blame for the very slight tardiness of this lab report rests entirely on the shoulders of Mr. Gwazda.

{kind=link}
{kind=link}
{kind=link}
{kind=link}