November 24, 2007
Reading for November 27th, are now posted. Enjoy!
October 2, 2007
To upload your thoughtless acts, create a new assignment page like any other lab. You'll see "Thoughtless Acts" listed as one of the assignment options.
May 24, 2008
This site has been archived and is no longer editable. Stay tuned for the next version, coming in the fall!
I modified the Spring example from Processing to accept input from Arduino board. Instead of using mouse, I used the force sensor to compress the spring. Upon releasing the force sensor, the spring will rebound, acting much like what a real spring would do.
Component
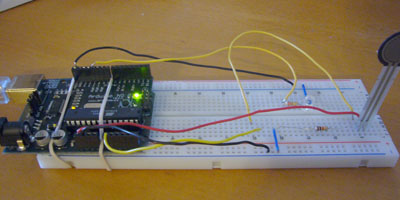
1.Arduino board 2.White breadboard 3.Red LED (connects to pin11) 4.220-OHM resistors (labeled as red-red-brown-gold) 5.Wires connect LED to Arduino board (black and short blue ones connect to ground, and yellow one connect LEDs and the resistors to the pin) 6.FSR (Force Sensitive Resistor) 7.10K resistor (labeled using brown, black orange and gold bands) 8.Wires connect FSR to Arduino board (black one and short blue ones connect 10K resistor to ground, red one connects to 5V, and yellow ones connect to pin 0 ) 9.2 rubber bands 10.USB cable 11.Arduino environment 12.Processing environment
Arduino Code
Down load from course website.
/* * Resistive Sensor Input * Takes the input from a resistive sensor, e.g., FSR or photocell * Dims the LED accordingly, and sends the value (0-255) to the serial port */ int sensorPin = 0; // select the input pin for the sensor int ledPin = 11; // select the output pin for the LED int val = 0; // variable to store the value coming from the sensor void setup() { Serial.begin(9600); } void loop() { val = analogRead(sensorPin); // read the value from the sensor, 0-1023 analogWrite(ledPin, val/4); // analogWrite (dimming the LED) can be between 0-255 Serial.println(val/4); // writing the value to the PC via serial connection delay(50); // rest a little... }
Processing Code
Modified from Spring example
/* * CustomSpring (modified from Spring example) * * Press the FSR to compress the spring; release FSR will release * the spring and let it bounce * * Sept 26, 2007 by Emelie Cheng * */
import processing.serial.*;
// for serial comm with Arduino board String portname = "COM7"; Serial port; String buf = ""; int cr = 13; int lf = 10;
// Spring drawing constants for top bar int s_height = 16; // Height int left = 50; // Left position int right = 150; // Right position int max = 100; // Maximum Y value int min = 20; // Minimum Y value boolean over = false; // If mouse over boolean move = false; // If mouse down and over
// Spring simulation constants float M = 0.8; // Mass float K = 0.2; // Spring constant float D = 0.92; // Damping float R = 50; // Rest position
// Spring simulation variables float ps = 50.0; // Position float vs = 0.0; // Velocity float as = 0; // Acceleration float f = 0; // Force float incr = 1.0; // increment
void setup() { size(200, 200); rectMode(CORNERS); noStroke(); port = new Serial(this, portname, 9600); }
// Set color and draw top bar if(over || move) { fill(255); } else { fill(204); } rect(left, ps, right, ps + s_height); }
void updateSpring() { // Update the spring position if(!move) { f = -K * (ps - R); // f=-ky as = f / M; // Set the acceleration, f=ma == a=f/m vs = D * (vs + as); // Set the velocity ps = ps + vs; // Updated position } if(abs(vs) < 0.1) { vs = 0.0; }
// Test if mouse is over the top bar if(mouseX > left && mouseX < right && mouseY > ps && mouseY < ps + s_height) { over = true; } else { over = false; }
if (move) { ps += incr; if (ps < min) { ps = min; } // this shouldn't happen since we don't pull the spring anymore if (ps > max) { ps = max; } } }
void serialEvent(Serial p) { int c = port.read(); if (c != lf && c != cr) { buf += char(c); } if (c == lf) { int val = int(buf); println("val="+val); if (val == 0) move = false; else { move = true; if (val < 128) incr = 1; else incr = 2; } buf = ""; } }